
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Пневматические приборы низкого давления tie только от самой регулируемой величины, но и от направления перемещения исполнительного органа Y, величина X инвертируется в решающем усилителе таким образом, что теперь нужны два решающих усилителя для выполнения вычислительных операций Ха=Ро +сХ и Ха= Ро-сХ. Наконец, обе величины ро + сХ и Ро - сХ подводятся к переключателю, управляемому импульсатором, который в зависимости от направления движения исполнительного органа передает регулятору либо величину ро + сХ, либо ро - сХ. Тот со своей стороны должен так подействовать на исполнительный орган, чтобы процесс регулирования непрерывно стремился к нахождению и поддержанию оптимального значения. На фиг. 5.6 показана общая схема, которую мы, безусловно, рекомендуем обстоятельно изучить, чтобы понять работу этого в высшей степени интересного регулятора. 5, Построение а исследование контура экстремального регулирования Любая, хорошо продуманная схема не имеет большой ценности до тех пор, пока она не построена и не исследована практически, тем более что в сложных схемах едва ли есть гарантия, что не допущено ошибок ни в продумывании, ни в составлении схемы. Лучшим методом проведения надежных исследований является проверка общей схемы в замкнутом контуре регулирования. Однако она не может быть так просто проведена на описанной ранее пневматической модели (см. стр. 169), и хотя подавляющая часть требуемых вычислительных схем может быть выполнена на г/ей, однако нельзя обойтись без дополнительных элементов и решающих усилителей. Не нужно здесь упускать возможность изобразить блок-схему контура регулирования, которая дает лучшее представление обо всей схеме, чем схема включения приборов. Поэтому на фиг. 5.7,а показаны общая, а на фиг. 5.7,6 более подробная блок-схемы контура оптимального регулирования. На фиг. 5.8 прииедены экспериментальные кривые колебаний в контуре оптимального регулирования, которые подтверждают правильность проведенных рассуждений и выбранной схемы. 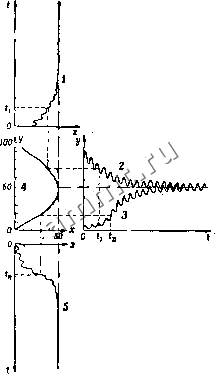 Фиг. 5. 8. Экспериментальные кривые колебаний при оптимальном регулировании. 1 - кривая колебаний регулируемой величины (оптимальное значение пройдено); г -изменение давления на клапане (оптимальное значение пройдено); 3 - изменение давления на клапане (оптимальное значение не достигнуто; 4 - характеристика объекта регулирования; 5 - кривые колебаний регулируемой величины (оптимальное значение не достигнуто). ГЛАВА VI Прогрессивное и регрессивное регулирование Образно говоря, нелинейности в регулирующих системах являются ядом . Но если яд использовать как противоядие, он может действовать как лекарство. Одно такое лекарство мы уже многократно применяли, как, например, в случае, когда квадратичная функция при помощи вычислительного звена, извлекающего корень, сводилась к линейной функции. До сих пор всегда, когда включались заведомо нелинейные звенья, это использовалось для устранения нелинейности. Напращивается мысль, а что если включать нелинейности в объекты регулирования не только для подавления их нелинейности, но также и для прямого подавления вредного влияния в самом объекте. Таким образом, мы приходим к интересному выводу использования нелинейности в регуляторах для улучшения результатов регулирования. Среди нелинейных регуляторов особенно большое внимание уделялось так называемому прогрессивному регулятору. Довольно трудно представить себе влияние нелинейного звена в регуляторах. Но еще труднее аргументировать это математически. Однако можно быстро ответить на важнейшие вопросы при помощи смоделированного йонтура регулирования. Разберем действие так называемого прогрессивного регулятора, который при большем отклонении регулируемой величины соответственно активнее реагирует, чем при меньшем отклонении. Итак, регулятор подавляет большие отклонения стремительнее и действеннее, чем малые. Следовательно, максимальные отклонения становятся меньше, чем при обычных линейных регуля- торах, и благодаря этому может быть достигнуто значительное улучшение процесса регулирования. Однако по поводу такого поверхностного суждения возникает сомнение, так как мы анализировали работающий прогрессивный регулятор, который теперь работает с зависящим от величины регулируемого отклонения коэффициентом усиления. Чем больше регулируемые отклонения, тем больше коэффициент усиления регулятора. При возрастающем коэффициенте усиления устойчивость регулирования понижается. Отсюда следует, что устойчивость регулирования неизбежно ухудшается по мере увеличения отклонения регулируемой величины. Но устойчивость не должна ухудшаться так, чтобы достигалась или даже переступалась граница устойчивости, так как после того, когда будет пройдена граница устойчивости, процесс регулирования в область устойчивости уже больше не возвращается. Поэтому регулятор должен быть настроен так, чтобы при возможно большем отклонении регулируемой величины существовала еще достаточная устойчивость. Но тогда устойчивость при малых и средних отклонениях регулируемой величины будет бесполезно высркой, и поэтому остаточные отклонения окажутся больше, чем это имело бы место при линейном регуляторе, работающем со средним демпфированием. При малых отклонениях система очень устойчива, в то время как при больших отклонениях регулятор может раскачать ее. Следовательно, при малых возмуще-1 ниях появятся сравнительно большие отклонения, а приi больших возмущениях - сравнительно малые. Несомненно, преимуществом является то, что регулирование вблизи от заданной величины протекает спокойнее, чем при больших отклонениях от нее. Но этот вывод будет неправильным, если предположить, что большие отклонения совсем не возникают. При больших возмущениях регулятор сначала воздействует слабо или совсем не воздействует, а затем активность его повышается. Было бы правильнее, если бы регулятор сразу стремительно реагировал на малые возмущения, так как тогда существовала бы гарантия, что и на большие возмущения он будет активно реагировать в начале их действия. Таким образом, мы дошли до так называемого регрессивного регулятора. Такой регулятор, следовательно, особенно сильное воздействие оказывает при малых отклонениях, а при больших он работает сдержаннее. Будем считать, что оба регулятора равноценны, ибо оба способа регулирования имеют и преимущества и недостатки, и нелегко решить, который из них лучше;. Регрессивный регулятор вблизи от задания работал бьи неустойчиво, а при возрастающих возмущениях устойчивость регулирования повышается. Нельзя не заметить, что большинство пере:адяных: функций сначала тесно прилегают к оси времени и только потом очень медленно отходят от нее. Это указывает: на то, что возмущение вначале воздействует очень aai-медленно, и ощущается очень слабое вмешательство) регулятора обычного типа. Это свойство регулятора от--рицательное, так как регулятор занимает еще позицию) ожидания, хотя он уже ощутил произошедшее возмуще-ние. Из этого следует, что действительное время запаз--дывания становится больше, чем это, безусловно, необходимо, и снижение этого времени в любом случае явилось бы фактом положительным. Шагом вперед в этош направлении является присоединение звена предвара-ния, благодаря которому действительное время запаздывания уменьшается до времени передачи Т . Подсбяьвг образом действовал бы регрессивный регулятор, такс как он вследствие своего опережающего и активного воздействия уменьшал бы действительное время запаздывания. При прогрессивном регуляторе действительное время запаздывания увеличивается. Прогрессивный регулятор ведет себя подобно регулятору с пониженной чувствительностью вблизи от заданной величины. Теперь возникает вопрос, не удастся ли достигнуть большего успеха, если использовать нечто среднее между прогрессивным и регрессивным регуляторами. Ответ на этот вопрос может дать модель контура регулирования. Но для этого мы должны построить прогрессивный и соответственно регрессивный регуляторы. Это для нас не должно быть трудно.
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |