
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Пневматические приборы низкого давления на И условный нуль могут быть настроены с помощью одномембранного задатчика. Однако недостаточно, если vl X будут изме- няться только в ту или другую сторону. Нам необходимо знать, насколько правильно выполняет звено заданную математическую операцию. Сначала мы хотим определить рассогласование Х. Оно равно X=X~Pf. Если мы установили ро = 50, мм вод. ст. и не будем больше изменять, а = 60 мм вод. ст., то Х будет равно +10 мм вод. ст. Если же мы установим = 40 мм вод. ст., то Х = -10 мм вод. ст. При регулировании ро соответствует заданной величине, и мы хорошо знаем, что при положительных рассогласованиях, т. е. пр.и уменьшении заданного значения, столб жидкости перемещается вниз, при отрицательных рассогласованиях, т. е. при увеличении заданного значения,- вверх. В качестве величины, характеризующей интегральный регулятор, введем постоянную времени Т/, т. е. время,-за которое значение Х изменится до значения Х. Если, например, рассогласование составляет Х- = 10 мм вод. ст. и выходной величине необходимо время в 1 мин, чтобы возрасти на 10 мм вод. ст., то 7,= = 1 мин. В литературе не приводится определения для Г,-. Однако оно весьма целесообразно, так как в этом случае постоянная времени интегратора идентична с постоянной времени апериодического звена в канале обратной связи. Хотя на фиг. 1.33,а понятно, как определить постоянную времени интегратора, все же необходимо коротко описать проведение эксперимента. После того как собрана схема, мы должны проконтролировать показывающий прибор. Давление питания Н должно быть равно 100 .чм вод. ст., а давление условного нуля ро и входное давление 50 мм вод. ст. Выходная величина Х может принимать любое значение. Важно, чтобы она сохраняла это значение. Если регулировка сопла с шариком правильна, можно приниматься за работу. После нескольких экспериментов следует проверить состояние и положение указывающих столбиков жидкости на манометрах и убедиться в том, что схема собрана верно. Пусть выходная величина Х = 30 мм вод. ст. Увеличим теперь входную величину Xg с 50 до 60 мм вод. ст. Благодаря этому возникнет рассогласование Х= = 10 мм вод. ст. и Хд сейчас же начнет увеличиваться с постоянной скоростью. Когда Х достигнет 40 мм вод. ст., включим секундомер и подождем, пока Х придет к значению 50 мм вод. ст., затем снова остановим секундомер. Он показывает 15 сек. Между тем Х продолжает возрастать. Заметим время, когда произойдет увеличение Х еще на Ю мм вод. ст., например между 60 и 70 мм вод. ст.; на основании этого устанавливаем, что постоянная времени интегратора составляет 15 сек. Теперь пусть Хе=40 мм вод. ст., при этом Х= = 10 жл вод. ст., и Ха начнет изменяться в противоположном направлении. Засечем время, когда Х медленно уменьшится на 10 мм вод. ст., оно составит ХЪсек. Когда Х уменьшится на 20 мм вод. ст., установим Xg на 50 мм вод. ст., и это будет сигналом для остановки Х . Теперь установим входную величину на 70 мм вод. ст. Тогда Х = 20 мм вод. ст. и Х тотчас начнет возрастать. Если мы засечем время, которое необходимо, чтобы Х возросло на 20 мм вод. ст., снова увидим, что оно составляет 15 сек. Прежде чем Х поднимется вверх, пусть Xg примет значение мм вод. ст. Тогда Х,= 20 л<л< во. ст. и Хд за 15 сек уменьшится на 20 мм вод. ст. Так как коэффициент усиления П-элемента Vl, выходная величина в первый момент изменится в том же направлении, что и входная, и будет равна ей по величине. В дальнейшем она будет изменяться со скоростью, пропорциональной рассогласованию Х. Направление перемещения зависит от знака рассогласования. При этом известный интерес представляют динамические процессы, последовательность которых будет хорошо понятна после нескольких экспериментов. Так как ПИ-звено состоит из пропорционально и интегрально действующих элементов, выходные величины которых суммируются, будет более правильным гово- рить не о ПИ-звене, а о (П +И)-звене. Однако мы не будем изменять принятого обозначения. Лучшим методом исследования вычислительного звена пропорционально-интегрального действия является раздельное исследование П- и И-элементов. При этом сначала можно включить вычислительное П-звено и исследовать его передаточные свойства. Затем отдельно собрать И-элемент и исследовать его. Этот метод довольно точен и надежен. Так как коэффициент усиления П-элемента равен 1, то выходная величина равна входной величине. Поэтому можно построить чистую схему И-элемента, входная и выходная величины которого будут суммироваться в суммирующем звене. Соединив затем оба звена вместе, получим ПИ-звено. Такие схемы целесообразно строить для учебных целей. На самом деле ПИ-звено состоит из И-звена суммирующего звена, которые в техническом исполнении составляют одно целое. Эту связь легко усмотреть из свойств ПИ-звена, если поступить следующим образом: изменить скачком входную величину и тут же измерить выходную величину. Если коэффициент усиления равен 1, то Х -Х. Затем целесообразно несколько подождать, чтобы измерить время, за которое выходная величина изменится до значения рассогласования, и таким образом определить постоянную времени Тп- В то время как И- и ПИ-звенья исследуются сравнительно легко, исследование дифференцирующего звена представляет известные трудности. Исследуем звено пропорционального действия с предварением, т. е. ПД-звено. Это звено так же, как и ПИ-звено, состоит из двух частей: П-элемента и Д-элемента, который может быть назван дифференцирующим звеном. В данном случае также будет более правильным . говорить не о ПД-звене, а о (ПЧ-Д)-звене, так как ПД-звено усиливает входную величину и суммирует ее с другой величиной, которая соответствует изменению скорости входной величины. Если входная величина изменяется скачкообразно, то скорость ее изменения в момент скачка бесконечно велика, благодаря этому бесконечно велика и величина предварения. При скачкообразном изменении входной величины ПД-звена выходная величина также скачкообразно возрастает до своего максимально возможного значения и сейчас же возвращается обратно. Вследствие этого для исследования звена предварения скачкообразное возмущение непригодно, так как слишком велика величина изменения скорости. Итак, будем медленно увеличивать входную величину. Однако выполнить это путем медленного вращения ручки настройки решающего усилителя, предназначенного для формирования входной величины, довольно трудно, так как вряд ли кто-нибудь способен осуществить равномерное вращение рукой. Кроме того, предварение регистрирует каждое непроизвольное вздрагивание руки. Несмотря на это, следует попробовать. То, что мы не можем сделать рукой, может выполнить простой решающий усилитель, работающий в качестве интегратора. Поэтому включим выход И-звена на вход ПД-звена. Время предварения легко можно определить, если собрать схему, показанную на фиг. 1.33,в. Выходная величина И-звена будет являгься входной величиной ПД-звена. На направление перемещения ииз-менение скорости выходной величины И-звена можно легко воздействовать путем изменения входной величины Xg. При этом в качестве установочного дросселя может быть использован постоянный дроссель. Целесообразно величину предварения сделать равной нулю, открыв полностью дроссель предварения. Тогда ПД-звено будет представлять собой простое П-звено с коэффициентом усиления, равным 1, т. е. выходная величина будет равна входной. Жидкость в трубках батареи манометров, обозначенных Xgnjx и Х, поднимается и опускается одновременно. Запаздывание отсутствует. Можно задать определенное предварение, вращая ручку настройки дросселя предварения в сторону его закрытия. Тогда выходная величина опередит входную, и тем больше, чем больше установлена величина предварения. Установим XgH= 40 мм вод. ст. Рассогласование на входе И-звена будет отрицательным. Оно составит -10 мм вод. ст. Вследствие этого Xgnji начнет умень- шаться и X быстро переместится вниз. Незадолго до того как XgUR подойдет к своему нижнему положению (около 10 мм вод. ст.), установим Хи =50 мм вод. ст. После этого Xgnji остановится, а Х начнет перемещаться вниз и тоже остановится. Если установить Xg = = 60 мм вод. ст., так что Хпд начнет изменяться в сторону увеличения давления, Х быстро пойдет вверх, затормозится и остановится около определенного значения. Подождем, пока Х успокоится, а затем с равномерной скоростью возрастет до 50 мм вод. ст., и включим секундомер. Когда Хпд тоже увеличится до 50 мм вод. ст., остановим секундомер. Время, которое показывает секундомер, будет временем предварения. Этот метод определения времени предварения настолько нагляден и понятен, что после нескольких экспериментов становится ясным также физический смысл предварения. Интересно и поучительно применение одного небольшого приема. Если перед исследованием протекания процесса предварения исследовать интегральное звено, то целесообразно ту же самую емкость с сопротивлением, которая была расположена в канале обратной связи И-звена, без изменений (ВКЛючить в канал обратной связи Д-эвена. В этом случае можно заранее определить время предварения. Если известны Г; -постоянная времени И-звена или Т постоянная времени ПИ-звена, то Ti-Tn-T = T, где - постоянная времени звена сопротивление - емкость в канале обратной связи. Конечно, можно измерить постоянную времени звена сопротивление - емкость, которое стоит в линии обратной связи, и таким образом определить время предварения. При этом время предварения определяется с большой точностью. Вероятно, такое измерение постоянной времени звена сопротивление-емкость в канале обратной связи является самым простым методом определения постоянной времени И-регулятора, постоянной времени ПИ- или ПИД-регулятора, а также времени предварения Г,-ПД-или ПИД-регулятора. . Об опытном определении постоянных времени То, что постоянные времени Ti, Т и равны постоянной времени звена сопротивление - емкость, объясняется следующим образом: скорость заряда аккумулятора (емкости) всегда пропорциональна имеющемуся перепаду давлений. У интегрирующих звеньев зарядное давление равно отклонению измеренной величины от заданной (регулирующему отклонению), а у дифференцирующего звена оно пропорционально скорости изменения измеряемой величины. Фиг. 1.34. Определение постоянной времени апериодического звена первого порядка путем измерения времени, за которое выходная величина будет составлять 63% от значения выходной величины а статике. 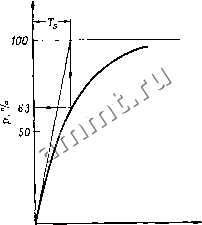 f ,сек Это не совсем легко понять теоретически, однако при помощи некоторых практических опытов понять можно. Между тем все же ясно одно: постоянные времени звена сопротивление - емкость играют важную роль, поэтому стоит задуматься над тем, как легко и быстро можно их определять. Для этого найдем переходную функцию апериодического звена (фиг. 1.34). Входной сигнал, поданный в виде скачка, равен 100 мм вод. ст. Затем значение выходной Величины увеличивается до этого же значения.
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |