
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Пневматические приборы низкого давления Чтобы установить, правильны ли предварительные рассуждения, ограничимся несколькими основными исследованиями. С этой целью построим прогрессивный регулятор, воздействие которого возрастает пропорционально квадрату отклонения регулируемой величины. Мм вод. ст. 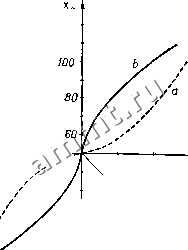 20 30 ЙО, БО 70 вОХ/ймвод. ро-\=50ммеод.ст. < 20 О Фиг. 6.1. Экспериментально полученные характеристики для нелинейных передаточных звеньев о - прогрессивная передаточная характеристика; б I- регрессивная передаточная характеристика. При регрессивном регуляторе воздействие должно быть пропорционально корню квадратному из отклонения регулируемой величины. При техническом выполнении прогрессивного и регрессивного регуляторов достаточно вслед за обычным П-звеном включить соответственно возводящий в квадрат или извлекающий корень решающий усилитель. Прогрессивный или регрессивный И- соответственно ПИ-регулятор может быть создан, если между П- и ПИ-звеном смоделированы контуры регулирования, включающие возведение в степень или извлечение корня. Создание нелинейного передаточного звена показано на фиг. 4.13,в и г. На фиг. 6.1 показан результат измерений зависимости выходной величины от входной для нелинейных звеньев. Исследования ограничиваются объектом регулирования третьего порядка. 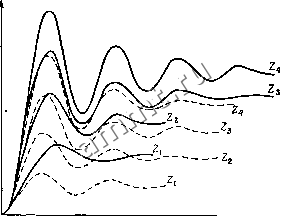 ----Линейный \!!-рщ- -Лрогресситшрторы Фиг. 6.2. Сопоставление экспериментально полученных кривых процессов регулирования линейного и прогрессивного П-регуляторов на объекте третьего порядка для четырех различных по величине возмущений. Чтобы можно было легко сравнить между собой результаты, полученные при равных условиях, колебательные процессы нанесены вместе на одном графике. На фиг. 6.2 приведены колебательные процессы с линейным и прогрессивным П-регуляторами, а на фиг. 6.3- колебательные процессы с линейным и регрессивным П-регуляторами. На фиг. 6.4 показаны несколько колебательных процессов с линейным и прогрессивным И-ре-гуляторами, а на фиг. 6.5 - несколько кривых, полученных с ПИ-регуляторами. Наряду с получением этих точно измеренных и поэтому могущих быть количественно оцененными кривых были проведены еще дальнейшие исследования, причем графики колебаний были вырезаны из диаграммы и соответственно сопоставлены. Эти результаты показаны на фиг. 6.6 и 6.8; они допускают только качественную оценку. 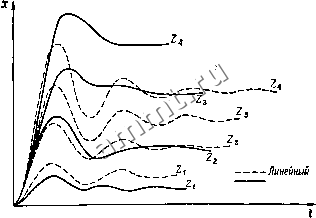 Регрессивный] пяторы Фиг. 6.3. Сопоставление экспериментально полученных кривых процессов регулирования линейного и регрессивного П-регуля-торов на объекте третьего порядка для четырех различных по величине возмущений. Правда, для полного обзора недостаточно проведенных исследований. Однако установлено, что ни с прогрессивным, ни с регрессивным регуляторами не удалось получить решающего преимущества по сравнению с линейным регулятором. Каждый тип регулятора может обеспечивать некоторые преимущества, которые, однако, связаны с соответствующими недостатками. Если взвесить эти преимущества и недостатки, то преимущество останется за линейным регулятором. Поэтому подтверждается уже выше высказанное предположение, что лучшим регулятором могло бы быть что-то среднее между прогрессивным и регрессивным регуляторами. Это - линейный регулятор. /. Регулятор с полупропорционально действующим передаточным звеном (ПП-регулятор) Если текущее значение регулируемой величины и удаляется от заданного значения, то на регулятор поступает задание возвратить ее к заданному значению. Регулятор при этом может воздействовать на регулируемую величину только в зависимости от степени отклонения ее от заданного значения. 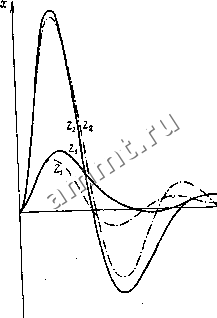 ---Пинейный .) 1.регуляторы .-Прогрессивный J Фиг 64. Сопоставление экспериментально полученных кривых процессов регулирования линейного прогрессивного И-регуляторов на объекте третьего порядка для двух различных по величине возмущении. Он продолжает воздействовать на регулируемую величину даже тогда, когда последняя возвращается к заданному значению, а в этом часто нет необходимости. 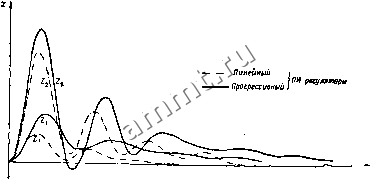 Ф и г. 6.5. Сопоставление экспериментально полученных кривых процессов регулирования линейного и прогрессивного ПИ-регуля-торов на объекте третьего порядка для двух различных по величине возмущений. Линейный регулятор Прогрессивный регулятор  Регрессивный регулятор Фиг. 6.6. Сопоставление кривых процессов регулирования, полученных с помощью самописца модели контура регулирования при одинаковых величинах возмущений для линейного, прогрессивного и регрессивного П-регуляторов на объекте третьего порядка. .....i Ланейшй регулятор Прогрессивный регулятор Регрессивный регулятор     Фиг. 6.7. Сопоставление кривых процессов регулирования, полученных с помощью самописца модели цепи регулирования при одинаковых величинах возмущений для линейного, прогрессивного и регрессивного И-регуляторов на объекте третьего порядка. Линейный регулятор Прогрессивный регулятор Регрессивный регулятор   Фиг. 6.8. Сопоставление кривых процессов регулирования, полученных с помощью самописца модели цепи регулирования при одинаковых величинах возмущений для линейного, прогрессивного и регрессивного ПИ-регуляторов иа объекте третьего порядка.
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||