
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Пневматические приборы низкого давления Теперь нетрудно представить себе, как можно построить ПП-регулятор. Можно в обычный П-регулятор\ включить одно полупропорциойально действующее звено и получить таким образом ПП-регулятор. Затем на эффективность регулятора можно воздействовать настройкой коэффициента усиления П-звена. Такой регулятор имеет только одну настраиваемую величину и при правильной настройке дает хорошие результаты. Он значительно превосходит любой линейный, а также а ПИД-регулятор. Это идеальный регулятор с одним органом настройки. В заключение можно констатировать, что ПП-регулятор на объекте с чистым запаздыванием и нулевым временем переходного процесса дает хорошие результаты. Этим доказана целесообразность его применения. 3. Регулятор с ПП-звеном на, объекте с чистым запаздыванием и конечным временем переходного процесса Чтобы вынести окончательное суждение о влиянии ПП-звена, проведенных до сих пор исследований недостаточно. Число встречающихся на практике объектов безгранично. На объекте с переходным процессом, но без запаздывания, т. е, на самом лучшем объекте П- и ПП-регуляторы практически равноценны. На таких объектах каждый регулятор дает удовлетворительные результаты. Очевидно, что ПП-регулятор тем более предпочтителен по сравнению с П-регулятором, чем меньше отношение TjTt, потому, что при Т/Г(. = сю оба регулятора практически равноценны, а при TJTf =0 П-регулятор гораздо эффективнее. Поскольку на практике чаще встречаются объекты, у которых отношение TjT имеет конечное значение, то ПП-регулятор всегда предпочтительнее. На объекте с самовыравниванием остаточное отклонение при применении ПП-регулятора в граничном случае апериодических колебаний всегда равно нулю. Лишь при выходе за границу апериодичности появляется остаточное отклонение. Все же не кажется целесообразны.м так настраивать регулятор, чтобы находиться на границе апериодичности, потому что временное остаточное отклонение устранялось бы очень медленно. ПП-регулятор можно настроить так, чтобы после резкого возмущения возникали умеренно затухающие колебания. Произведем некоторые опыты на модели. 4. ПП-регулятор на объекте с самовыравниванаем На модели процессы протекают относительно медленно, поэтому можно легко определить момент времени, когда регулируемая величина начнет приближаться к заданному значению и вручную поддерживать выходную величину регулятора до тех пор, пока регулируемая величина не возвратится к заданному значению. Конечно, недостаточно просто блокировать регулирующий орган на время возвращения регулируемой величины к заданному значению, потому что его положение изменилось бы скачкообразно после снятия блокировки. Нужно к тому времени, когда регулируемая величина начнет приближаться к заданному значению, остановить исполнительный орган, так чтобы он включился тотчас же, как это понадобится. Существует простой путь получения желаемого эффекта: можно в течение времени, когда регулируемая величина движется к заданному значению, так управлять настройкой регулируемой величины или настройкой суммирующего и инвертирующего звеньев, что выходная величина регулятора останется неизменной. Хотя в принципе безразлично, какая из двух настроек выбирается, следует остановиться на управлении настройками суммирующего и инвентирующего звеньев, если работают с большим коэффициентом усиления. Это имеет место на объектах низкого порядка. Возможности ПП-регулятора можно оценить лишь относительно. Для этого мы сравним результаты ПП-регулятора с результатами ПИ-регулятора с помощью кривых затухания, полученных при одинаковых возмущающих воздействиях. Исследования проводятся на объектах от второго до щестрго порядков, причем вначале снимается функция переходного процесса. Затем после подачи единичного возмущающего воздействия на вход объекта с оптимально настроенным ПИ-регулятором снимается крива51\ переходного процесса. Сразу же после этого фиксируется кривая переходного процесса при том же возмуще-иии, но с оптимально настроенным ПП-регулятором. На фиг. 6.14 показаны эти кривые. В большинстве (случаев количественная оценка затруднительна, потому что значения, найденные планиметрированием площади, юграниченной кривой переходного процесса, не дают -ЯСНОГО ответа на то, какой переходный процесс является лучшим, поскольку в одном случае эта площадь только положительная, а в другом - и положительная и отрицательная. Поэтому мы удовлетворимся только качественной оценкой. Результаты опыта подтверждают ранее высказанное соображение: ПП-регулятор на объектах низкого порядка почти равноценен ПИ-регулятору. С повышением порядка объекта ПП-регулятор более эффективен, чем ПИ-регулятор. ПП-звено регулятора может при известных условиях эффективно заменить И-звено. Подключение к регулятору ПП-звена делает его более совершенным. 5. ПП-регулятор на объекте без самовыравнивания В случае если объект должен регулироваться П-регулятором, большого значения не имеет, обладает ли объект самовыравниванием или нет. П-регулятор дает объекту недостаточное самовыравнивание. Это особенно хорошо заметно тогда, когда И-звено присоединяется к П-регулятору. В этом случае интегрирующая часть вследствие влияния пропорциональной части придает объекту самовыравнивание и уменьшает трудности стабилизации. Поэтому можно утверждать, что при присоединении ПП-регулятора на объект без самовыравнивания благодаря выравнивающе!йу действию П-звена недостаток самовыравниванвд объекта компенсируется. Таким 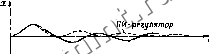 ПП-регулятор О
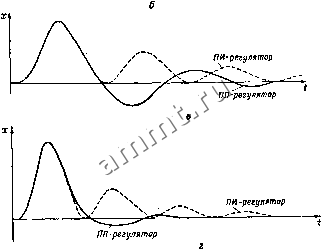 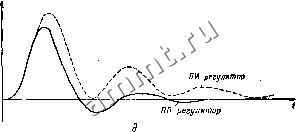 Фиг. 6.14. Сопоставление кривых процессов регулирования ПИ- и ПП-регуляторов при одинаковых возмущениях а - иа объекте второго порядка с самовыравниванием; б - на объекте третьего порядка с самовыравниванием; в - иа объекте четвертого порядка с самовыравниванием; г - иа объекте пятого порядка с самовыравниванием; д - т объекте шестого порядка с сацовыравннваяие . образом, на объекте без самовыравнивания ПИ- и ХТП регуляторы дадут примерно одинаковые результаты. Модель контура регулирования подтверждает это. Чтобы быстрее прийти к цели, ограничимся исследованиями на объекте третьего порядка без самовыравнивания и построим его так, чтобы он состоял из двух апериодических звеньев с самовыравниванием и одного последовательно включенного интегрирующего звена. После снятия функции переходного процесса сначала снимается переходный процесс с ПИ-регулятором и сразу после этого переходный процесс с ПП-регулятором. 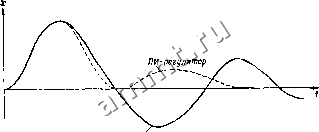 ПП-регулятср . Фнг. 6.15. Сопоставление кривых процессов регулирования ПИ- и ПП-регуляторов на объекте третьего порядка без самовыравпивания при одинаковых возмущениях. Так получены кривые переходных процессов, показанные на фиг. 6.15, которые подтверждают ранее высказанные предположения. Здесь ПП-регулятор работал бы тем лучше, чем больше было бы время чистого запаздывания по сравнению со временем разгона. Систематические исследования на объектах более высоких порядков будут проведены позднее. 6. ПП-регулятор с предварением (ППД-регулятор) Величина улучшения результатов регулирования после присоединения звена предварения в большой степени зависит от структуры объекта. Вспомним, что на безынерционном o6beKte с запаздыванием предварение не моглр дать улучшения. Это может произойти и при добавлении звена предварения к ПП-регулятору, потому что результаты регулирования достаточно удовлетворительны и улучшение не представляется возможным. До сих пор предварение только тогда приносило улучшение, когда оно могло уменьшить имеющееся чистое запаздывание. Это относится к объектам, которые наряду с временем переходного процесса имеют и запаздывание. Задача звена предварения и заключается в том, чтобы исключить неблагоприятное влияние - задержку, что как раз и делает предварение. Однако наряду с уменьшением действующего времени запаздывания за счет исключения задержки предварения одновременно уменьшается время переходного процесса. Поскольку чистое запаздывание нежелательно, а время переходного процесса благоприятно сказывается на регулируемости объекта, то обычное постоянно включенное предварение наряду с улучшением вносит и ухудшение. Исследования контуров регулирования, включающих ПП-регулятор, показали, что уменьшение времени переходного процесса объекта оказывается благоприятным тогда, когда включен обычный постоянно работающий регулятор. Наконец, ПП-регулятор безупречно работает с безынерционными объектами, в то время как простой П-регулятор здесь бесполезен. Можно исходить из того, что уменьшение времени переходного процесса за счет включения звена предварения в ПП-регулятор не оказывает столь вредного влияния как при добавлении звена предварения к простому П-регулятору. А если это так, то можно выбирать предварение, добавляемое к ПП-регулятору, значительно большим, чем то, которое включается с П-регулятором. Путем простых рассуждений можно прийти к выводу, что добавление звена предварения к ПП-регулятору на объектах без самовыравнивания позволяет полностью избежать остаточных отклонений и при апериодическом регулировании. Так что предварение, наряду с другими преимуществами, может компенсировать недостаточное самовыравнивание. Выяснение всех зависимостей в этом случае потребовало бы многодневной экспериментальной работы на
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |
||||||||