
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Полупроводниковая схемотехнология поскольку Пт\д\ /-о - Для реализации такой частотной характеристики параллельно П-регулятору включается интегратор (рис. 26.5). На Пропорццональ- Р ный усилитель Интегратор  Рис. 26.5. Блок-схема ПИ-регулятора. рис. 26.6 приведена диаграмма Боде полученного ПИ-регулятора. ПИ-регулятор на низких частотах ведет себя как интегратор, а на высоких-как линейный усилитель.
-45 -90 Рис. 26.6. Диаграмма Боде ПИ-регулятора. Переход от одного режима к другому характеризуется граничной частотой fj ПИ-регулятора. На этой частоте фазовый сдвиг составляет - 45°, а коэффициент усиления регулятора \Ак\ превышает Ар на 3 дБ. Для расчета граничной частоты / из формулы (26.5) находим комплексный коэффициент усиления регулятора: Ая = Ар+- = Ар{\+ . .] -Отсюда следует / ю/\ 1 Ar = Ар\ \ + -;-], где щ = 2кГ, = --. - \ ;<о/ lAp (26.6) ПИ-регулятор может бьггь реализован также с помощью одного операционного усилителя. Соответствующая схема приве- Рис. 26.7. ПИ-регулятор. дена на рис. 26.7. Комплексный коэффициент усиления определяется следующим выражением: + l/j(oC, Ar = - Rl V j(oC,Rj . (26.7) Приравнивая выражения (26.5) и (26.6), получаем Ар= - 27СС/Л, (26.8) Теперь на примере представленном на рис. 26.4, более подробно рассмотрим выбор оптимальной граничной частоты интегрирования f,. Сначала, не учитывая интегральную составляющую, увеличим коэффициент усиления Ар настолько, насколько позволяет требование к затуханию. Из рис. 26.4 видно, что фазовый сдвиг данного объекта на частоте 700 Гц равен - 120° и соответствующий коэффициент усиления Ms! = 0,14 = - 17 дБ. Таким образом, для обеспечения запаса по фазе 60° следует выбрать Ар = -f-17 дБ. Этот случай иллюстрируется на рис. 26.4. Критическая частота при выбранных параметрах составляет Л X 700 Гц. Как уже отмечалось, необходимо выбирать граничную частоту интегрирования/; малой по сравнению с чтобы не увеличивать фазовый сдвиг вблизи С другой стороны, однако, неразумно выбирать ее меньшей, чем необходимо, поскольку это увеличивает время, за которое рассогласование интегратора становится нулевым. Верхняя граница/ равна 0,1/. Такие параметры используются на рис. 26.4. Соответ- ствующий переходный процесс установлт ния ошибки регулирования иллюстрируют- Рис. 26.8. Рассогласование. Сверху: П-ре17лятор; внизу: ПИ-ре17лятор с оптимальной установкой fj. осциллограммы на рис. 26.8. Из нижней кривой видно, что ПИ-регулятор при таком оптимальном выборе параметров обеспечивает нулевое рассогласование за то же время, за которое П-регулятор дает ошибку 1/(1 + д) = 8 = 12,5%. >....... - ШШШШШШт Ь-- ---- Рис. 26.9. Рассогласование ПИ-регулятора. Сверху: мало; внизу: fj велико. Эффект не совсем оптимальной установки fi показан на рис 26.9. Для верхней кривой f, была выбрана меньшей: в результате время установления возросло. Для нижней кривой частота f, была выбрана большей: уменьшился запас по фазе. 26.2.3. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО- ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР ПИД-регулятор можно построить на основе ПИ-регулятора, если в последний ввести дифференцирующее звено (рис. 26.10). Эта схема на частотах выше граничной частоты дифференцирования ведет себя как дифференцирующее звено. Как следует из диаграммы Боде на Ue\ 1 Дифферемциру-ющее звено Пропори,иоиапь-ный усилитель ApUe Интегратор Рис. 26.10. Блок-схема ПИД-регулятора. рис. 26.11, фазовый сдвиг возрастает до 90°. Это фазовое опережение на высоких частотах может использоваться для того, чтобы отчасти скомпенсировать фазовое отставание объекта вблизи При этом можно установить большой коэффициент линейного усиления и получить высокую критическую частоту f, благодаря чему уменьшится длительность переходного процесса. А (Log) 45° Рис. 26.11. Диаграмма Боде ПИД-регулятора. Расчет параметров опять проиллюстрируем на примере: повысим коэффициент усиления Ар до значения, при котором запас по фазе составляет только 15°. Из рис. 26.12 в этом случае выбираем Ар = = 50 = 34 дБ и - 2,2 кГц по сравнению с 700 Гц в случае ПИ-регулятора. Если выбрать теперь граничную частоту дифференцирования /о я; /t, то фазовый сдвиг регулятора на частоте составит 45°, т.е. запас по фазе возрастет с 15 до 60°, и получится требуемая переходная характеристика Граничную частоту интегрирования /; можно определить таким же образом, как и для ПИ-регулятора; следовательно, fi ~ /lo/f Отсюда находим частотную характеристику коэффициента усиления в цепи обратной связи, представленную на 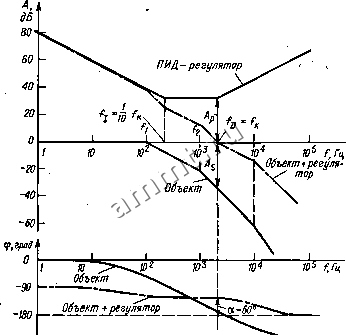 -270 - рис. 26.12 Сокращение времени установления по отнощению к ПИ-регулятору можно увидеть, если сравнить осциллограммы, приведенные на рис. 26.13. При схемотехнической реализации ПИД-регулятора будем исходить из блок-схемы на рис. 26.10. Комплексный коэффициент усиления Ar = Ар+ jaxo + = Рис. 26.12. Пример диаграммы Боде объекта с ПИД-регулятором. При этом fo = Ap/lnxo и fi = 1/2яЛрТ;. (26.10) Схема с частотной характеристикой, соответствующей уравнению (26.9), может быть построена на одном операционном усилителе, как показано на рис. 26.14. Ее комплексный коэффициент усиления R С + + j<oCoR2 + J(oC,R, (26.9) При Со/С, R2/R1 отсюда получаем (26.11) Со R2 Cl Рис. 26.13. Сравнение переходных характеристик для объекта с ПИ-регулятором (сверху) и ПИД-регулятором (внизу). Рис. 26.14. ПИД-регулятор. \0а 1
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |