
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Цилиндрические электромагнитные экраны 0,8 0,6
0,2 0,f 0,6 0,8 j. 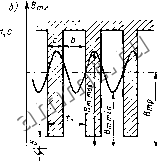 Рис. 3.15. Распределение индукции в зазоре: о - под пазом; б -в зоне зубцового шага U-b-i-c Пример 3.1. Оценить распределение индукции в зоне паза линейного двигателя SL=5 со следующими данными: 6=10 мм; с=6 мм; *4=8 мм; бр=1-ь2 мм. Решение. В соответствии с (3.3) fee =1,444-1,29; б,.= 1,442,58 мм; Sm min/fim max = 0,22 -Н 0,34; 26,/fe = = 0,29 ч- 0,52, откуда по (3.97) определяется Втг/Вштах (рНС. 3.15); ПО (3.98) амплитуда пазовых гармонических Вт тах/Втр =--- = 1 64-f- I + (0,22-0,34) Н-1,49; Вт min/Bmp = 2-(1,64 1,49) = = 0,36-=-0,51. 3.4.3. Индукция иа торце якоря. Распределение поля на торцовой грани магнитопровода (рнс. 3.13, а) получается подстановкой в (3.94) величины Ь->-оо, откуда V(x, 2)=(2V,;T)arctg(.V2), (3.99) / sin (njb) % \ ->oc \ sh (я/Ь) г I 6-00 V (-7t/6 )zch(7t/b) г Распределение составляющей Hz напряженности магнитного поля на торцовой грани магнитопровода якоря со стороны воздушного зазора в соответствии с (3.82) и (3.99) dV (X, г) 20 -х/г п 1 -Ь (х/г) (3.100) напряжение где Ко=Ярб( - магнитное в зазоре. Уравнение (3.100) не учитывает зазора о. В действительности наличие зазора  Метод KOHqjopMHbix 2 преобразований * 8 12 IS 20 А С Рис. 3.16. Распределение индукции иа торце сердечника якоря . приводит к ослаблению индукции пропорционально размеру зазора (рис. 3.16). Если предположить, что силовая линия поля равняется четверти круга радиуса х, то ослабление поля определяется отношением 2пх/4 X ---=-. После коррек- в-Ь2;тХ/4 28/7:4-X тировкн (3.100) получается распределение индукции на поверхности подвижного стального элемента (г=0) в виде =--. (3.101) Уравнение (3.101) почти точно совпадает с распределением, полученным в [3.7] (рис. 3.16). В [3.7] также предлагается приближенное выражение Втг/Втр = =0,83ехр[-х/(2б)]. На окончательную форму поля в зазоре имеет, кроме того, большее нлн меньшее влияние насыщение стальных частей магнитопровода, магнитная анизотропия электротехнической стали, тип обмотки и т. п. Глава четвертая РАСЧЕТ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ МАШИН 4.1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ Современные методы анализа и проектирования систем электропривода вое чаще опираются на обобщенную теорию электромеханического преобразования энергии [3.6, 4.12, 4.16-4.18]. Здесь используется вариационный принцип Гамильтона (1.131) где i(<7*, Qk, О =7 -I- функция состояния Лангранжа; Г и V - кинетическая и потенциальная энергия системы [3.6]. Условием экстремума функционала (1.131) ивляется уравнение Эйлера-Лагранжа для диссипативных систем dL d / dL\ dF - = -Gs. (4.1) -Ri 0 0 R2 ../? ! 0 0\Rn+i Ol. I- 1-.. 0 0 Mv, I где ft=l, 2, 3...; / - число степеней свободы системы; F - функция потерь Рей-ли; С - возмущающие .силы электрического (напряжения) и механического (силы и моменты) происхождения. Из (4.1) после преобразования получается (п + т+ I) уравнений движения для электрической п-фазиой машины с т элементарными обмотками на роторе. Rn-vm--n.i-m - All, n+m Afn+i.i n+m, n+m in-vm (4.2)
. (4.3) В (4.3) M, Msw, Mws, Afaia, ЯВЛЯЮТСЯ матрицами собственных индуктивностей статора (5s), ротора (ww) или взаимных индуктивностей между статором и ротором (SW, WS). Матрицы М. в (4.3) имеют форму, идентичную соответствующим четвертям матрицы индуктивностей в (4.2). Правая часть (4.3) представляет собой электромагнитный момент машины Ше. Решение (4.2) и (4.3) позволяет найти экстремальные величины ik=ik(t) и те = те (t). Получение простого решения возможно только в наиболее примитивных моделях. Уже для двух- и трехфазных машин трудоемкость получения решения резко возрастает, хотя составленная однажды программа позволяет многократно ее использовать для исследования динамики различных машин. При этом часто достаточно только изменить соответствующие параметры, однако от точности расчета Этих параметров может зависеть успех расчетов. Уравнения (4.2) и (4.3) используются прежде всего для исследования асинхронных двигателей. 4.2. ЭЛЕМЕНТЫ МАТРИЦЫ АКТИВНЫХ СОПРОТИВЛЕНИЙ 4.2.1. Матрицы активных сопротивлений. Для многофазной машины (рис. 4.1) с п обмотками статора и т обмотками ротора матрицы активных сопротивлений статора S и ротора w имеют вид (-7?! о О ... О О R2 О ... О противление проводников при постоянном токе, увеличенное в kd раз, где ka - коэффициент дополнительных потерь, причем ka = kti kk. R = kaR= = k т1г c + t ДР (4.5) Rr = 0 0 .. 0 (4.4) . Rn+m- Активные сопротивления симметричных обмоток можно выразить при помощи единичных матриц Rs = RilSik]: RrRilik], где матрица [6<*] - единичная квадратная матрица. причем в{й = /? * -дельта-функция Кро- ~ R~IR= - PujPpt \\, если i = 6 некеоа. п .. ........ где w - число последовательных витков обмотки; 1г - длина витка; 5 - поперечное сечение проводиика; у - проводимость материала проводиика при температуре о; t - температура обмотки; с=235 - для меди, с=245 - для алюминия; ftu - коэффициент дополнительных потерь в обмотке, вызванных индуктированными в теле проводиика потоком рассеяния вихревыми токами; kx - коэффициент дополнительных потерь от вихревых токов, индуктированных в массивных частях конструкции, в торцовых поверхностях сердечника и т. п. - потоком лобовых соединений, или в массивных поверхностях полюсных наконечников - высшими гармониками вращающегося поля и зубцовыми гармониками; в больших машинах коэффициент kx может достигать значения, равного или больше 2; расчет затруднителен и обычно оценивается приближенно на основе, например, непосредственного измерения потерь ДР = mPR -Ь ДРдоп. 4.2.2. Влияние вытеснения тока на активное сопротивление. Коэффициент увеличения активного сопротивления в результате вытеснения тока в проводниках на переменном токе, называемый также коэффициентом дополнительных потерь в обмотках, определяется в форме (4.6) некера. В обычных машинах активные сопротивления обмоток фаз статора и фазного ротора рассчитываются как активное со- 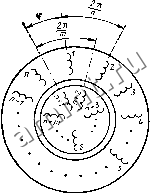 где 7? - активное сопротивление обмотки прн переменном токе; R= - активное сопротвлеине обмотки при постоянном токе; ДР =ЛР=-)-ДРдоп - полные потери в обмотке при переменном токе; AP= = mPR -основные потери; ДРдоп - дополнительные потери. Для части обмоток, лежащих вне пазов (например, лобовых соединений), можно принять в первом приближении Лв и для пазовой части обмоток kuz>l. Средний коэффициент дополнительных потерь в обмотках (4.7) Рис. 4.1. Схема машииы с п обмотками статора и т обмотками ротора где /(- длина якоря; / -длина лобового соединения. В современных машинах большой мощности обычно йи1,1н-1,5. Расчет величины kuz- В соответствии с методом зеркальных отражений (см., рнс. 1.8 и 1.9 в [1.22] проводники размером аХЛ, размещенные в пазу с полным током Iw (рис. 4.2), можно заменить бесконечной плитой с толщиной 2Л не содержащей стали и составленной из сетки проводников тех же самых размеров. Для упрощения
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |
|||||||||||||||||||||||||||||||||