
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Частичная автоматизация компрессора тической характеристикой, изображенной на рис. 12, в, и имеет дифференциал 2%. В нерабочую часть цикла температура поднимается по экспоненте и стремится к предельному (установившемуся) значению ун. Однако при температуре ts + >i (ts - заданное значение) реле переключается и температура начинает понижаться. В течение рабочей части цикла температура стремится к предельному значению typ. Эта часть цикла заканчивается при температуре 4 - и- Так как по условию процесс в объекте регулирования без запаздывания может быть представлен выражением (1,2), то его решение по формуле (15) для данного случая: 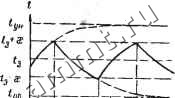 кон (у иач) X X ехр Отсюда 7-06 J ty нач (74) (75) Рис. 93. Двухпозиционное регулиро- где индексы при, величинах вание температуры в объекте 1-го температуры обозначают на-порядка без запаздывания. чальное, конечное и установив- шееся значения. В тепловых объектах постоянная времени при повышении температуры, как правило, не равна постоянной времени при ее понижении. Кроме того, как видно из графика (см. рис. 93), начальная и конечная температуры: для рабочей части цикла (понижение температуры): нач = 3 ~Ь 1 кон ~ ta > ДЛЯ нерабочей части (повышение температуры): нач - кои ~ з ~Ь Подставляя эти значения в формулу (75), получим длительности частей цикла: рабочей: УР 3 нерабочей: = - о6.н 1п .(76) (77) Введем обозначения: р = . н = : (78) об.р об.н ун УР Р= -. (80) уи ур В формулах (78), (79) и (80): Тр и Тн - относительная длительность рабочей и нерабочей частей цикла, а - коэффициент нагрузки, р - относительная чувствительность реле. Все эти величины безразмерны и позволяют вести анализ в общем виде. После подстановки формул (78), (79) и( 80) в выражения (76) и (77) получаем i- = -l . (82) Эти выражения назовем обобщенными нагрузочными характеристиками двухпозиционной системы. Графически нагрузочные характеристики представлены на рис. 94 в координатах (тр, Тн, а) для различных значений параметра р. Пользуясь этими характеристиками, можно для любой нагрузки и чувствительности реле найти относительные длительности частей цикла, а затем перевести эти величины в натуральный масштаб времени. Теперь учтем, что система, кроме апериодического звена, содержит звено запаздывания. Картина автоколебаний для этого случая представлена на рис. 95. Переключение реле происходит не при отклонениях ±х, а спустя время запаздывания, которое может быть разным для рабочей и нерабочей частей цикла td .р и Td . Для определения параметров автоколебаний представим каж-дуют часть цикла в виде суммы Тр = Хор tdp + Тдр,- . (83) Тн = -он + Тйн + Тдн . (84) Величины то.р и То. н обозначают отрезки времени, необходимые для изменения температуры от % до -к и обратно от -% ДО к. Другими словами, это длительности частей цикла в той же системе, но без запаздывания Следовательно, величины Тор и Тон могут быть найдены по характеристикам (81) и (82) или взяты из графиков, представленных на рис. 94. Величины запаздываний т. р и t<j. н должны быть заданы на основании расчета или экспериментального определения характеристик объекта. Отсюда следует, что неизвестными величинами являются отрезки времени Тдр и Тдн, которые можно определить из выражений [43] Тдр = In Тдн =1П 1-а + Р (1 - ехр [- TdH ]) 1 + (1 - ехр f- Tdp ]) (85) (86) Здесь об.р Тд.н - об.н Tdp -об.р TdH = об.н Подставляя полученные значения отдельных составляющих в выражения (83) и (84), находим длительности рабочей и нерабочей частей цикла, а затем и коэффициент рабочего времени (71). - - t 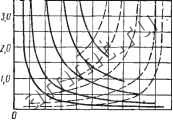 0,2 0, 0,6 0,6 ---Тр 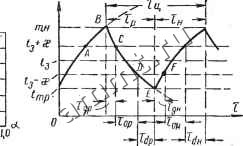 Рис. 94. Обобщенные нагрузочные Рис. 95. Двухпозиционное регулиро-характеристики двухпозиционной си- вание температуры в объекте с за-стемы. паздыванием. Для определения величин тр и tmn, между которыми происходят колебания температур в процессе регулирования, можно воспользоваться формулами imp = ур - (гур - 4 + ) ехр [- ]. (87) 4н = ун - (ун - 4 - ) ехр [ - TdH ] (88) или специальными графиками (см. [35]). Пример. Рассчитать параметры автоколебаний в двухпозиционной системе регулирования температуры кипения для двух режимов работы: I режим typ = - 38° С, ун - - 18° С;
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |